

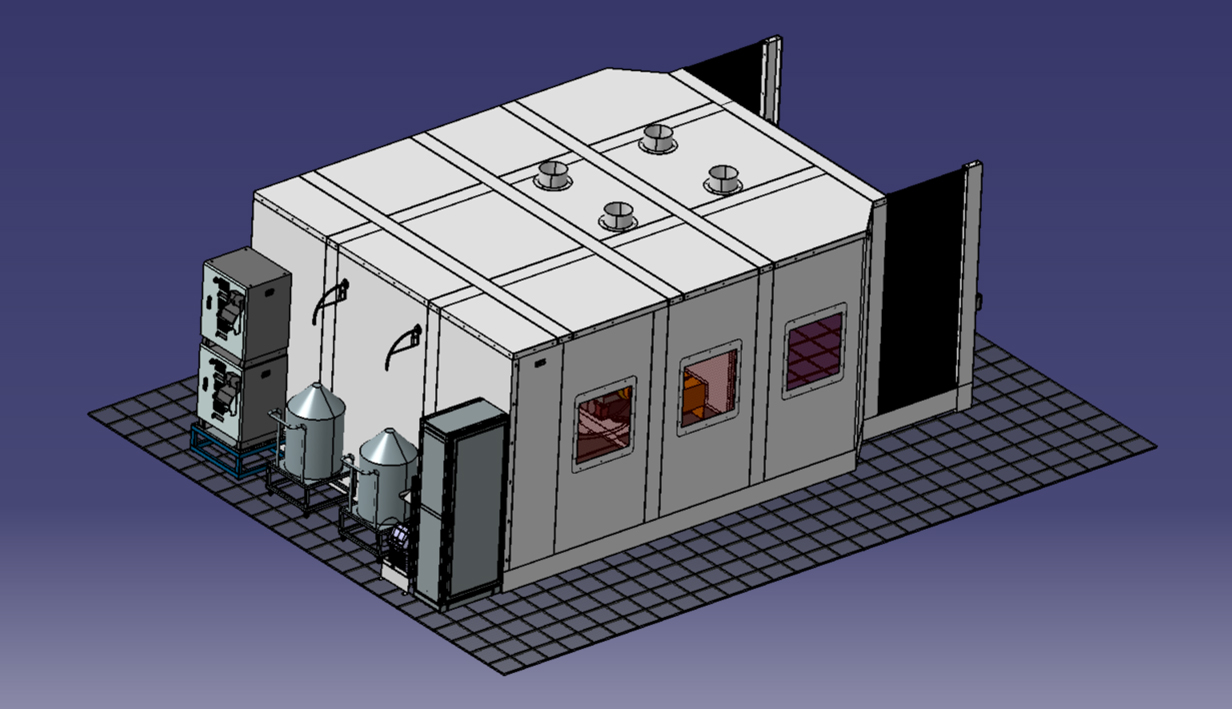
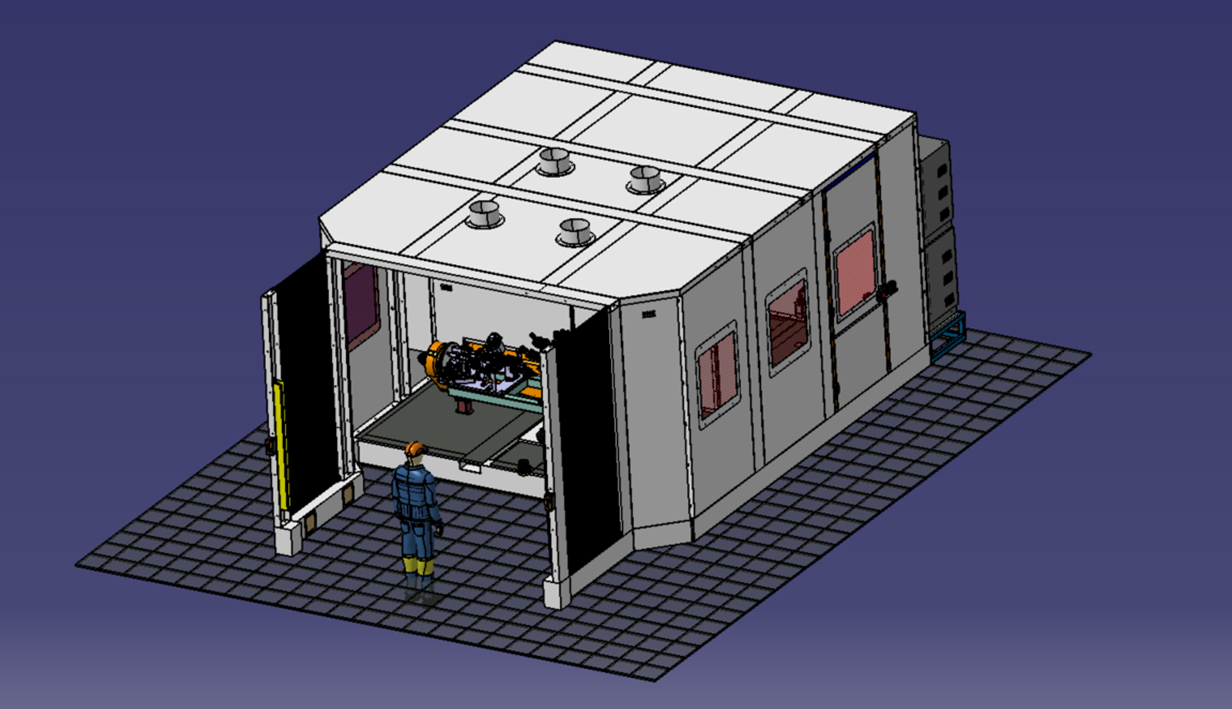
Konstruktion einer robotergestützten MAG-Schweißzelle mit zwei Robotern und Positionierer
In modernen industriellen Produktionsanlagen spielen robotergestützte Schweißzellen eine entscheidende Rolle, um hohe Qualitätsstandards, reproduzierbare Schweißpräzision und eine optimierte Prozesseffizienz sicherzustellen.
Insbesondere in der Automobil- und Schienenfahrzeugindustrie steigern robotergestützte MAG-Schweißsysteme die Produktionsgeschwindigkeit erheblich und minimieren gleichzeitig Qualitätsschwankungen.
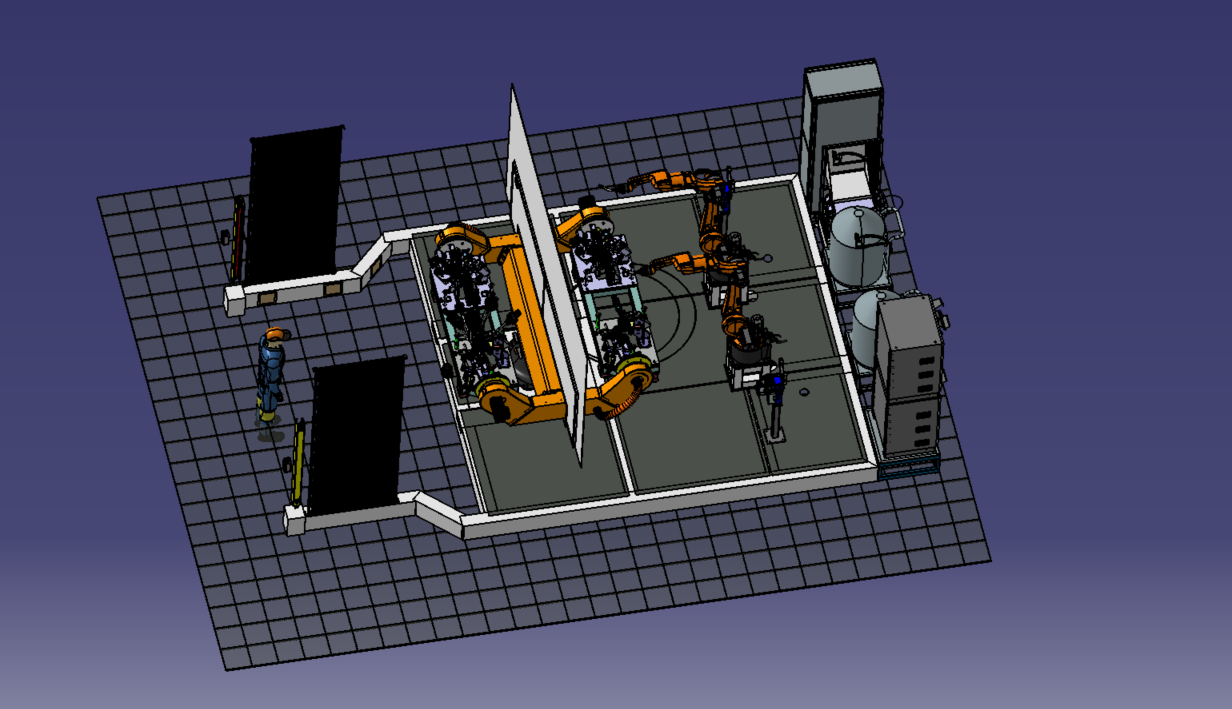
Im Rahmen dieser Ingenieurarbeit wurden detaillierte Prozessauslegungen, Erreichbarkeitsanalysen sowie Schweißszenario-Planungen für eine robotergestützte MAG-Schweißzelle mit zwei Industrierobotern und einem servoangetriebenen Positionierer durchgeführt.
Prozessengineering bei der Auslegung von Roboterschweißzellen
Eine der wichtigsten Phasen bei der Konstruktion von Roboterschweißzellen ist die optimale Positionierung der Bauteile sowie die präzise Analyse der Roboterarbeitsbereiche.
In diesem Projekt wurden folgende Punkte detailliert geplant und in einer Simulationsumgebung validiert:
• Synchronisierte Arbeitsabläufe zweier Roboter
• Drehstrategien des Positionierers entsprechend der Bauteilgeometrie
• Kollisionsanalysen
• Optimierung der Schweißzugänglichkeit
• Verbesserungen der Zykluszeit
Durch diesen Ansatz konnten die Arbeitsbereiche der Roboter maximal effizient genutzt und gleichzeitig eine stabile Schweißqualität gewährleistet werden.
Einfluss der Positionierer-Integration auf die Schweißqualität
In robotergestützten MAG-Schweißanwendungen beeinflussen Positioniersysteme die Schweißqualität direkt, indem sie das Bauteil in der optimalen Schweißposition halten.
Durch die Integration eines servoangetriebenen Positionierers ergeben sich folgende Vorteile:
• Verbesserung der Kontinuität der Schweißnaht
• Minimierung des Bedienereingriffs
• Optimierung der Zugriffswinkel der Roboter
• Reduzierung schweißbedingter Verformungsrisiken
Dadurch werden sowohl die Produktionsqualität als auch die Fertigungsgeschwindigkeit deutlich gesteigert.
Ingenieurtechnischer Ansatz bei der Konstruktion von Roboterschweißzellen
Für den erfolgreichen Betrieb robotergestützter Schweißzellen in modernen Produktionsanlagen reicht die Auswahl des passenden Roboters allein nicht aus.
Die Zellkonstruktion erfordert einen ganzheitlichen Ansatz, der mechanische Konstruktion, Vorrichtungsengineering, Prozessoptimierung und Erreichbarkeitsanalysen integriert.
Im Rahmen dieser Arbeit wurden folgende Aspekte ganzheitlich betrachtet:
• Roboter-Erreichbarkeitssimulationen
• Optimierung der Schweißreihenfolge
• Layoutplanung der Schweißzelle
• Kapazitätsanalysen des Positionierers
• Bewertungen der Prozesssicherheit
Dieser integrierte Ansatz ermöglicht eine Auslegung, die die Produktionsleistung nachhaltig steigert.
Bedeutung robotergestützter MAG-Schweißsysteme in der Industrie
Robotergestützte MAG-Schweißzellen sind für Automobil- und Schienenfahrzeughersteller mit Serienproduktion unverzichtbare Systeme.
Eine korrekt ausgelegte Roboterschweißzelle ermöglicht:
• Standardisierte Produktionsqualität
• Reduzierte Zykluszeiten
• Geringere Fehlerquoten
• Höhere Effizienz der Produktionslinien
Die gemeinsame Optimierung von Robotern, Positionierern und Vorrichtungssystemen stellt einen der entscheidendsten Faktoren für eine langfristig hohe Produktionsleistung dar.